1. Características técnicas deMotor eVTOL
In electricidade distribuídapropulsión, os motores impulsan varias hélices ou ventiladores nas ás ou na fuselaxe para formar un sistema de propulsión que proporciona empuxe á aeronave. A densidade de potencia do motor afecta directamente á capacidade de carga útil da aeronave. A capacidade de saída de potencia, a fiabilidade e a adaptabilidade ambiental do motor son factores importantes para determinar as características dinámicas e a seguridade da aeronave propulsada por electricidade. A selección de vehículos eléctricos, drons e motores eVTOL é diferente debido aos diferentes custos, escenarios de aplicación e outras razóns [1].

(Fonte da foto: Sitio web oficial de Network/Safran)
1) vehículos eléctricos: imán máis permanentemotores síncronos,Os motores de imán permanente con maior eficiencia e maior par motor poden proporcionar unha mellor experiencia de condución. Ao mesmo tempo, a alta densidade de potencia dos motores de imán permanente tamén pode axudar aos vehículos eléctricos a obter maior potencia co mesmo volume.
(2) UAV: sen escobillas de uso comúnMotor de corrente continua.O motor de corrente continua sen escobillas ten un peso e un ruído baixos, e o custo de mantemento é baixo, o que é axeitado para os requisitos de voo dos UAV; en segundo lugar, a velocidade do motor de corrente continua sen escobillas é maior, o que é axeitado para as necesidades de voo de alta velocidade dos drons. Por exemplo, DJI usa motores sen escobillas.
(3) eVTOL: Con maiores requisitos para a eficiencia do motor e a densidade de par, o motor síncrono de imán permanente é unha solución moi prometedora para o sistema de enerxía de propulsión eléctrica, porque o motor de imán permanente de fluxo axial ten unha alta taxa de utilización do espazo radial e a densidade de potencia e a densidade de par teñen vantaxes no caso dunha relación lonxitude-diámetro pequena. As aeronaves VTOL eléctricas actuais, como o Joby S4 e o Archer Midnight, adoptan motores síncronos de imán permanente [1].
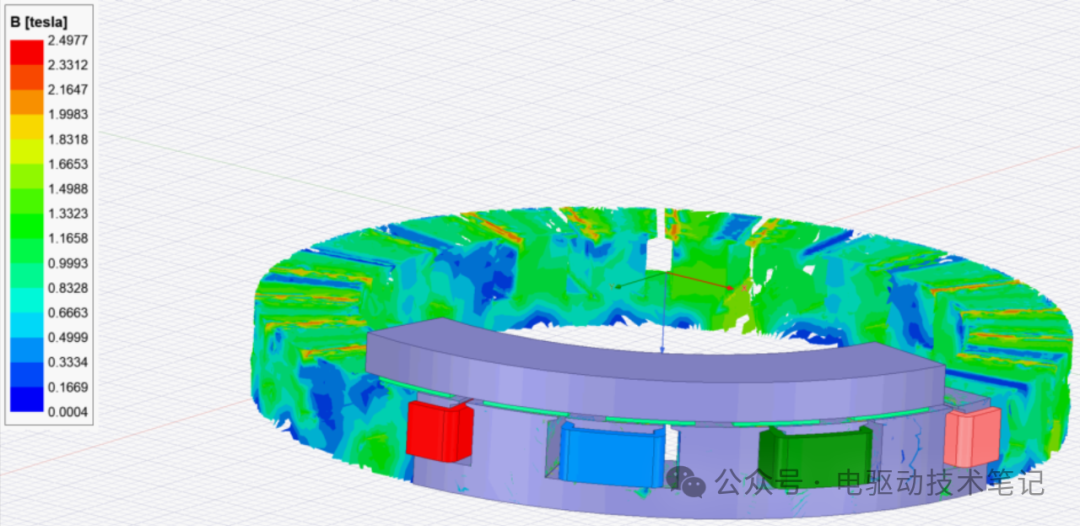
A seguinte figura mostra a imaxe da nube da intensidade de indución magnética do rotor fixo dun motor de fluxo axial dun só rotor e un só estator.
A seguinte figura é unha comparación dos parámetros do motor dun avión eléctrico e dun vehículo eléctrico

2. Tendencia de desenvolvemento do motor eVTOL
Na actualidade, a principal tendencia de desenvolvemento do sistema de alimentación eVTOL é reducir o peso da estrutura do motor e o peso auxiliar do sistema de refrixeración mediante a mellora da tecnoloxía de deseño electromagnético, a tecnoloxía de xestión térmica e a tecnoloxía lixeira, e mellorar constantemente a densidade de potencia do motor e a capacidade de saída de potencia nunha ampla gama de condicións variables. Segundo a "Investigación e desenvolvemento de coches voadores e tecnoloxías clave", o motor de propulsión da aviación foi capaz de facer que a densidade de potencia nominal do corpo do motor sexa superior a 5 kW/kg mediante o uso de materiais de illamento con límites de temperatura máis altos, materiais de imán permanente con maior densidade de enerxía magnética e materiais estruturais máis lixeiros. Ao mellorar o deseño da estrutura electromagnética do motor, como o uso de matriz magnética de Halbach, estrutura sen núcleo de ferro, enrolamento de fío Litz e outras tecnoloxías, así como a mellora do deseño de disipación de calor do motor, espérase que a densidade de potencia nominal do corpo do motor poida alcanzar os 10 kW/kg en 2030 e que a densidade de potencia nominal supere os 13 kW/kg en 2035 [1].

3. Comparación de rutas eléctricas puras e híbridas
En comparación coa ruta eléctrica pura e a ruta híbrida, segundo a selección actual de fabricantes relevantes, o proxecto eVTOL nacional baséase principalmente no esquema eléctrico puro, limitado pola densidade de enerxía das baterías de ións de litio, e o eVTOL de baixa capacidade de pasaxeiros é o mellor escenario de aterraxe da tecnoloxía de propulsión eléctrica pura. No estranxeiro, algúns fabricantes xa expuxeron o plan híbrido con antelación e tomaron a iniciativa en múltiples roldas de probas e iteración. Como se pode ver na seguinte táboa, o esquema híbrido é obviamente máis forte no ángulo de resistencia e pode acadar máis aplicacións no escenario de tráfico de media-longa distancia e baixa altitude no futuro [1].
Data de publicación: 27 de febreiro de 2025